

我中心与新加坡国立大学的联合团队自主研发轻型无人车 并完成校园开放道路测试
近日,我中心与新加坡国立大学联合团队自主研发的无人驾驶高尔夫车在四川大学江安校区顺利完成校园开放道路测试,实现从普通车辆向全链条无人驾驶平台的关键跨越。团队基于一辆普通高尔夫车,自主完成线控、感知、定位、导航等核心模块构建,形成用于校园开放道路测试的完整无人车系统。据悉,该成果是西南地区高校首辆自主研发并完成开放道路测试的轻型无人车,标志着我中心在无人车平台建设与智能驾驶技术攻关方面迈出重要一步。

图1:川大—新国立联合团队无人车校园开放道路测试剪彩现场
遵循硬件建设与软件开发双线推进的总体技术路线,联合团队以一辆普通高尔夫车为基础完成轻型无人车的底层硬件改装与平台搭建。硬件建设按照“线控化—传感化—电气化—安全化—平台化”五个阶段逐步推进,最终形成能够支撑无人驾驶算法研发与系统验证的工程化车载平台,为后续软件集成与能力扩展奠定了坚实基础。在硬件平台稳定成型后,项目团队进一步建设了涵盖“感知—定位—预测—规划控制”等模块的软件系统,实现轻型无人车在校园开放道路上的自主运行能力。系统通过多源感知与融合定位获取环境与位姿信息,并结合预测分析与规划控制,使车辆能够在真实场景下完成巡航、转弯与动态避障等基本功能,为后续算法迭代与场景扩展提供可靠的软件基座。

图2:轻型无人车硬件平台建设总体技术路线图
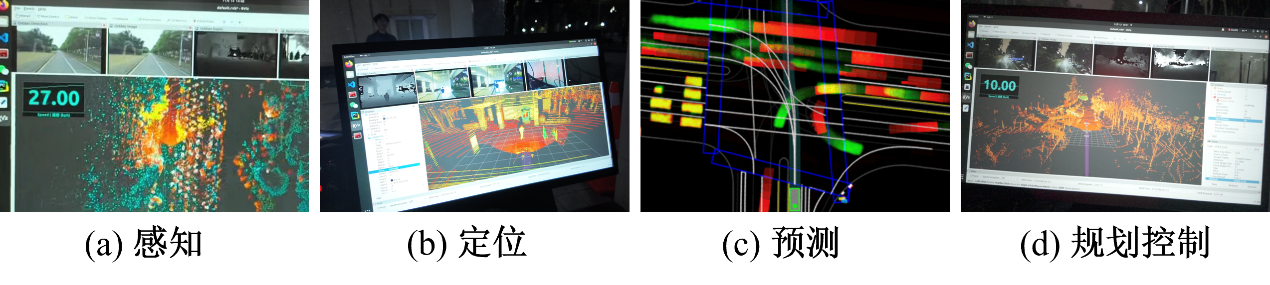
图3:轻型无人车软件模块示意图
本项目依托四川大学“111计划”数据智能分析与应用创新引智基地,由川大计算机与新加坡国立大学组成的联合团队实施。核心成员包括新加坡国立大学 Marcelo Ang Jr. 教授、我中心吕建成教授、四川大学计算机学院周颖杰老师与郭宏亮老师等。联合团队在机器人与无人驾驶、多智能体决策、时序分析与异常检测、世界模型等方向具有深厚积累,汇聚计算机、软件工程、机械电子等多领域师生,形成由本科、硕士、博士共同参与的多学科研发梯队,实现从算法到系统的协同攻关,为无人车平台持续迭代与多场景验证提供有力支撑。

图4:川大计算机—新国立联合团队合影
目前,联合团队已建成面向轻型无人车教学与科研的完整验证平台,为无人驾驶技术的研发与测试奠定了系统基础。团队在此基础上形成了覆盖线控改装、感知与定位、软件闭环等模块的可扩展研发体系,为后续能力提升提供了稳定底座。下一阶段,团队将重点推进基于高德/百度地图的校园导航、自然语言交互导航、多模态时序预测与异常检测等方向的研究,并探索基于世界模型的端到端导航方法在真实场景中的部署与验证。